Science Advances发布:利用卷绕人工肌肉提升磁控微型机器人面向生物医疗应用的可用性
近日,由同济大学牵头实施的上海市市级科技重大专项“人工智能前沿基础理论与关键技术——自主智能无人系统”再添新成果:专项成员唐一超教授联合德国马克斯普朗克研究所、苏州大学合作研发了一种基于卷绕人工肌肉的磁控微型致动器。在外部磁场的驱动下,这种致动器将以收缩和旋转的方式对环境进行高能量密度输出,输出力比普通的磁控软体致动器高10^4-10^5倍,大幅提升了磁控机器人在真实体内场景的可用性,使其可以满足临床外科手术的需求。如此巨大的性能提升主要得益于卷绕人工肌肉庞大的预储能,可以很大程度上解决磁控机器人能量密度低、输出力小的本征缺陷。通过将该致动器与不同的机构相结合,可以衍生出多个具有较高性能的磁控微型机器人,如伤口缝合机器人、组织切除机器人、组织钻孔机器人。通过将该致动器与双稳态机构集成,可进一步放大致动器的驱动应变量和输出力,得到输出力>10N的磁控伤口闭合机器人。另外,将磁力矩驱动的变形功能引入到多单元卷绕人工肌肉时,这种致动器能兼顾柔顺性和能量输出,使其在微型无缆生物医疗器件方面具有巨大的应用价值。这项研究成果于北京时间3月12日发表于《科学进展(Science Advances)》,论文标题为《基于微型卷绕人工肌肉的无缆柔软医疗机器人(Miniature CoiledArtificial Muscle for Wireless Soft Medical Devices)》。
·现有磁控微型软体机器人在高性能输出方面存在诸多挑战
磁控微型无缆柔软机器人可以在微密闭空间(如生物体内)中安全且自主的运动和探索,在医疗领域拥有巨大的应用潜力。然而,柔软材料在赋予了机器人大变形和交互安全能力的同时,严重限制了机器人的能量输出,这主要是由于小尺寸和低刚度材料难以存储或释放能量造成的,也一定程度是磁控设备难以产生持续时间长、强度高的可编程磁场导致的,是微型磁控机器人的本征缺陷。因此,目前的微型磁控机器人的输出能量很难满足对机器人性能要求较高的临床场景(如体内外科手术),是该领域应用于体内真实环境的痛点和亟需解决的关键问题。例如,目前主流的毫米级磁控柔软机器人的最大输出力大约在60 μN左右,远远低于外科手术中夹持器、切除器、封堵器等医疗器械进行有效工作时的作用力(大于1N)。因此,实现微型磁控机器人在输出力和比功方面的“大跃进”是这一领域的迫切需求。
·一种基于卷绕人工肌肉的磁控致动器设计
为了解决这一挑战,该研究借用卷绕人工肌肉的储能特性,研发出了一种具有高能量密度、能响应高频磁场的新型磁控致动器。这种致动器由一根三明治结构的纤维加捻卷绕而成,其中肌肉核心用来保障纤维在旋绕过程中形成螺旋形结构;保护层的作用一方面是隔热,另一方面是避免致动器内层结构直接暴露于外部环境中。驱动层是最关键的一层,其内部掺杂了片状氧化石墨烯和Fe3O4纳米粒子。其中,片状氧化石墨烯的作用是增加驱动层的韧性以提高致动器的能量输出;Fe3O4纳米粒子的存在使得致动器可以响应高频交变磁场,并且纳米颗粒本身具有对基底材料的增韧作用,可进一步提升人工肌肉性能。
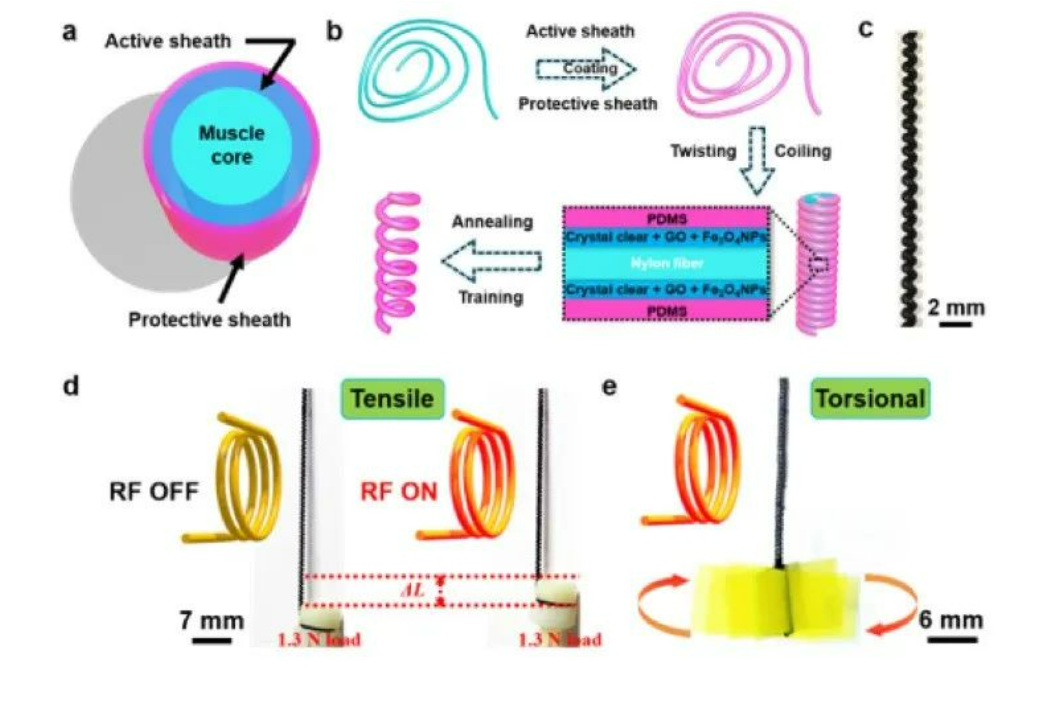
图片1:(a)磁控卷绕人工肌肉截面结构示意图。(b)磁控卷绕人工肌肉的制备过程。(c)磁控卷绕人工肌肉介观形态。
该人工肌肉在高频交变磁场激励下可进行(d)收缩和(e)旋转。
在高频交变磁场激励下,致动器可以表现出收缩或旋转两种响应模式。通过一系列实验测试,研究者对驱动层中的氧化石墨烯和Fe3O4纳米粒子含量进行优化,使致动器实现高输出力(~ 3.1 N)和高比功(~ 3.5 kJ/kg)。
·基于卷绕人工肌肉的磁控医疗机器人
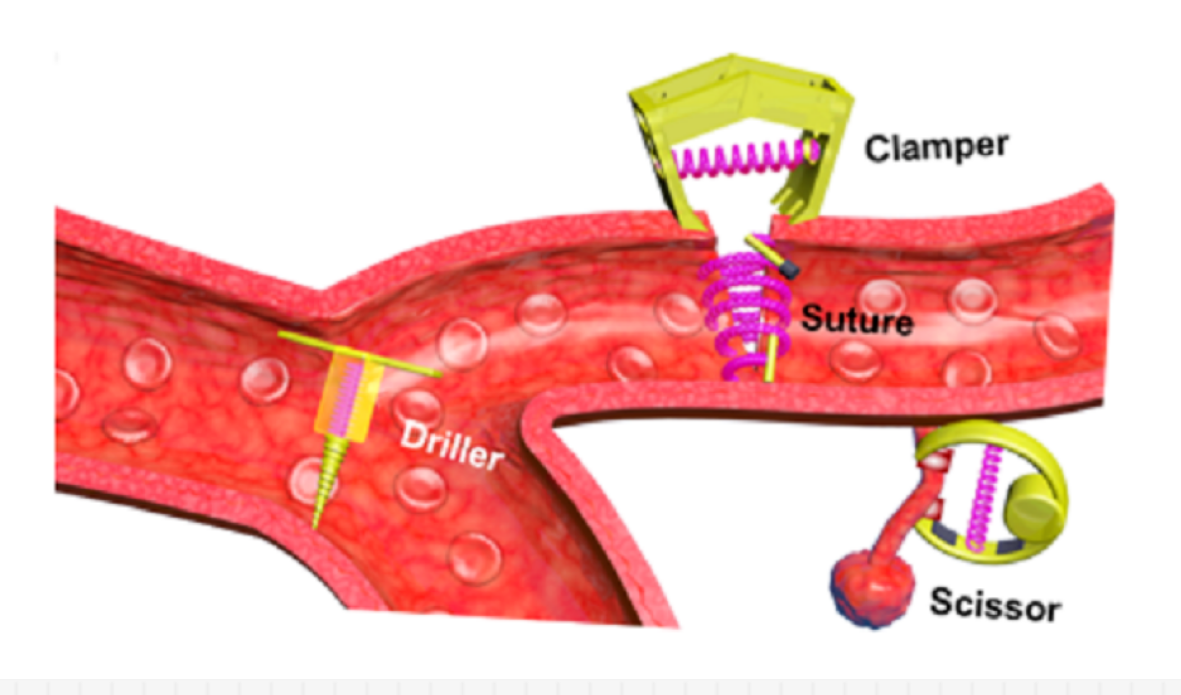
通过将该致动器与不同的机构相结合,可以衍生出多个具有较高性能的磁控微型机器人,如伤口缝合机器人、组织切除机器人、组织钻孔机器人、伤口闭合机器人。
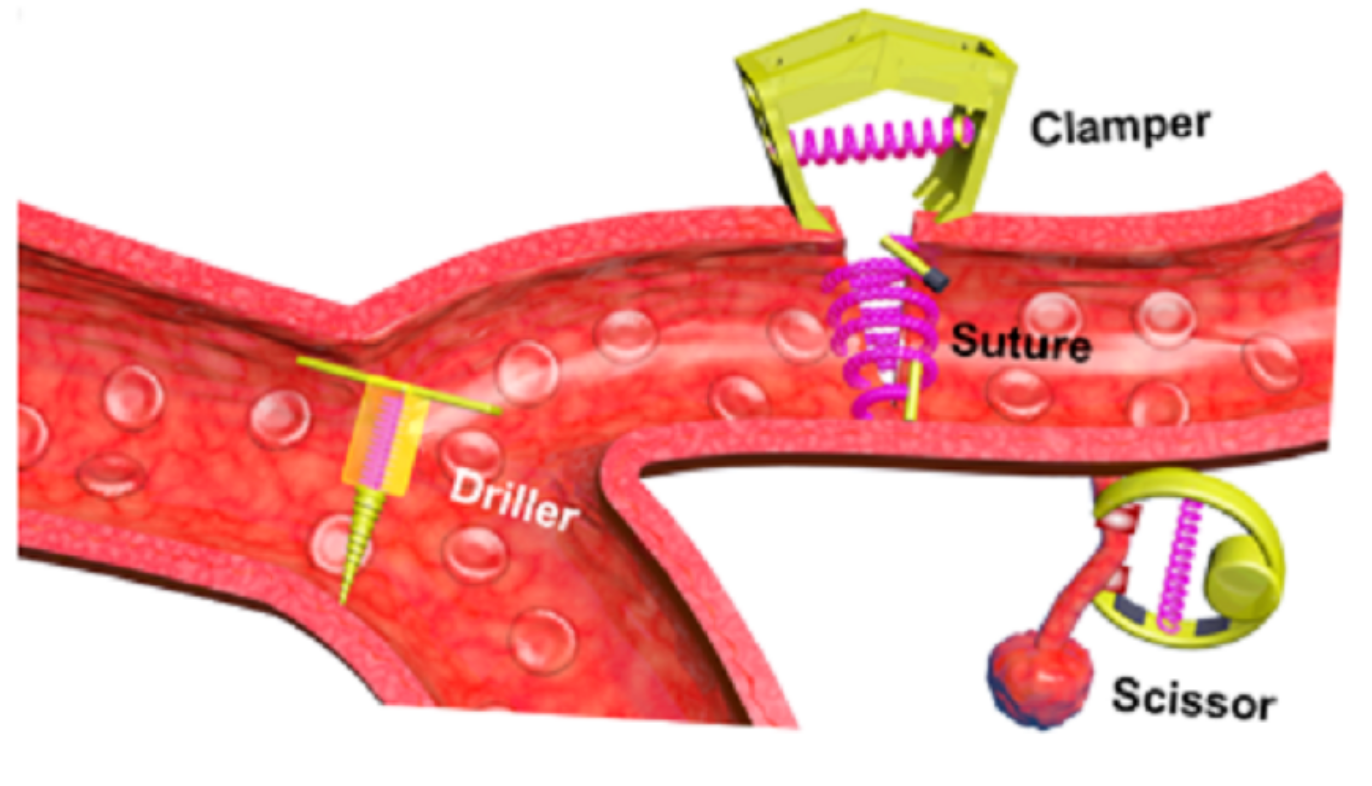
图片2:示意图表示卷绕人工肌肉可被设计成伤口缝合器件、切除器、钻孔器件、夹持器件,以实现在生物医疗领域的多功能应用。
此外,通过引入具有储能性质的双稳态结构,进一步放大磁控卷绕人工肌肉的驱动应变量、输出力和比功,实现磁场驱动下的开放伤口闭合。另外,在致动器的最外部额外引入磁响应层,可以将致动器设计成多节结构,在外部低频磁场的作用下进行蠕动,在高频磁场的作用下表现出高能量收缩性能。总的来说,该项研究利用卷绕人工肌肉在加捻过程中可以大量储存应变能的特点,研发出高能量密度磁驱卷绕人工肌肉,大幅提升了磁控致动器的比功和输出力,初步实现了微型医疗机器人的性能跃进和功能扩展,距离运用磁控微型机器人技术解决现实世界的临床问题更近了一步。
同济大学唐一超教授和苏州大学李明通博士为该研究工作的共同第一作者;德国马克斯普朗克智能系统研究所胡文琪博士和MetinSitti教授为共同通讯作者。
唐一超,国家高层次人才、洪堡研究学者,现为同济大学机械与能源工程学院教授、上海市人工智能市级科技重大专项成员、博士生导师,主要从事医疗机器人、微型机器人、仿生机器人的研究,已在Science、ScienceAdvances、Advanced Materials、PNAS等国际知名期刊发表多篇论文。联系方式:电子邮箱地址(tangyichao@tongji.edu.cn)。李明通,苏州大学和马克斯普朗克智能系统研究所的联合培养博士,主要从事微型软体机器人等方面研究工作。截止目前,已在NatureCommunications、Science Advances、MaterialsHorizons、 ACS Applied Materials & Interface等期刊发表多篇论文。
