张琳
博士,硕士/博士生导师。
课题组面向前沿科技与国家重大需求,聚焦Robotaxi(民用)、特种无人车辆(军用)的智驾决策与安全运动控制系统。致力于突破高级自动驾驶在复杂交互场景、未知非结构化路面下的核心技术瓶颈,旨在实现高安全-高机动的车辆侧纵垂一体化协同运动,重点研究学习型控制方法、端到端加速决策与部署等。
研究方向:自动驾驶智能决策,智能底盘侧纵垂协同控制,自进化学习型控制方法及应用
在科研实践中,课题组极力提倡学生在真实的实验平台上验证自己的算法。真正的智驾技术绝不能仅仅停留在计算机的仿真闭环里,为此,课题组为学生配备了丰富且完备的智能驾驶与底盘控制验证与算力平台。课题组鼓励学生将写下的每一行代码、推导出的每一次控制指令,都实打实地部署到硬件和实车环境中去接受检验。通过物理世界最真实的反馈,才能深刻感知理论与实际的边界,真正做到“不仅知其然,更知其所以然”。在这里,学生将亲手打通从第一性原理推导、算法编写到实车落地的全链路,淬炼出真正能解决复杂工程问题、经得起实战考验的硬核实力!
课题组项目经费充裕,设立项目津贴,参与项目的同学按月发放项目津贴,秉持多劳多得的一贯传统,充分保障成员的劳动价值。此外,全额支持优秀学生出国参与国际会议,课题组积极鼓励内部交流协作,倡导开放共享的学术氛围,助力成员在思维碰撞中拓宽视野、共同成长。长期招收优秀硕士、博士,可同时招收汽车与能源学院、同济大学上海自主智能无人系统科学中心(智能科学与技术方向)的博士,鼓励并支持博士提前毕业,欢迎大家报考。
学生就业方向:华为,比亚迪,蔚来,字节跳动,Momenta,长城,宇通等头部车企、体制内的研究所及央国企。
师从郭孔辉院士,与IEEE Fellow、中国汽车工程学会/自动化学会会士陈虹教授长期合作,具有车辆工程、控制科学与工程、以及人工智能的学科交叉背景。
主持国家重点研发计划课题、子课题、国家自然科学基金委面上项目、青年项目、博新计划等纵向项目,主持航天八院、西北机电研究所(202所)、东风、长城、一汽、英特仿真等校企合作项目;以第一作者/通讯作者发表SCI期刊论文30篇,出版“十四五”国家重点出版物专著1部(第一作者),授权美国发明专利13项、中国发明专利14项。获得中国汽车工程学会技术发明特等奖(排3/6)、中国自动化学会科技进步特等奖(排3/23)、国家工业软件大会领先工业软件奖(排1)、中国交通运输协会科学技术奖科技进步一等奖(排5/15)、上海市“超级博士后”激励计划,中国汽车工程学会优秀博士学位论文提名奖等。受邀担任《信息与控制》、《吉林大学学报(工学版)》等期刊青年编委,目前为中国自动化学会车辆控制与智能化专委会委员、中国汽车工程学会动力学分会委员、中国车辆控制与智能化大会程序委员会副主席。
纵向项目:
国家重点研发计划项目,智能汽车场景库应用与多维测试评价技术,课题负责人
国家自然科学基金面上项目,松软崎岖地形六驱全转向无人特种车的高机动运动预测控制,项目负责人
国家自然科学基金青年科学基金,混合交通流下网联自动驾驶汽车侧-纵向运动的一体化预测安全控制,项目负责人
国家重点研发计划项目,自进化学习型自动驾驶系统关键技术,子课题负责人
博士后创新人才支持计划,极限工况下智能汽车侧-纵向运动一体化优化控制方法研究,项目负责人
校企合作项目:
上海航天控制技术研究所,载人月球车xx控制与xx驾驶xx,项目负责人
上海航天控制技术研究所,特种车辆多轮稳定协同控制方案论证及关键技术攻关,项目负责人
耐世特汽车系统(苏州)有限公司,NEXTEER Vehicle Motion Control Software Development,项目负责人
长城汽车股份有限公司,车辆状态估计及四电机扭矩分配算法开发,项目负责人
东风汽车集团股份有限公司,自进化学习型分布式驱动控制系统智能动态协调控制及优化,项目负责人
中国第一汽车集团有限公司,极限工况下的自动驾驶规划控制方法研究,课题负责人
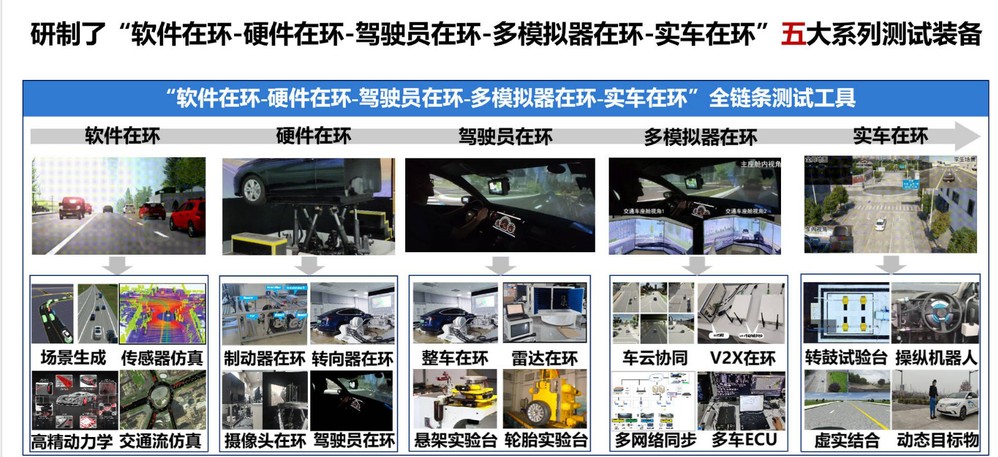
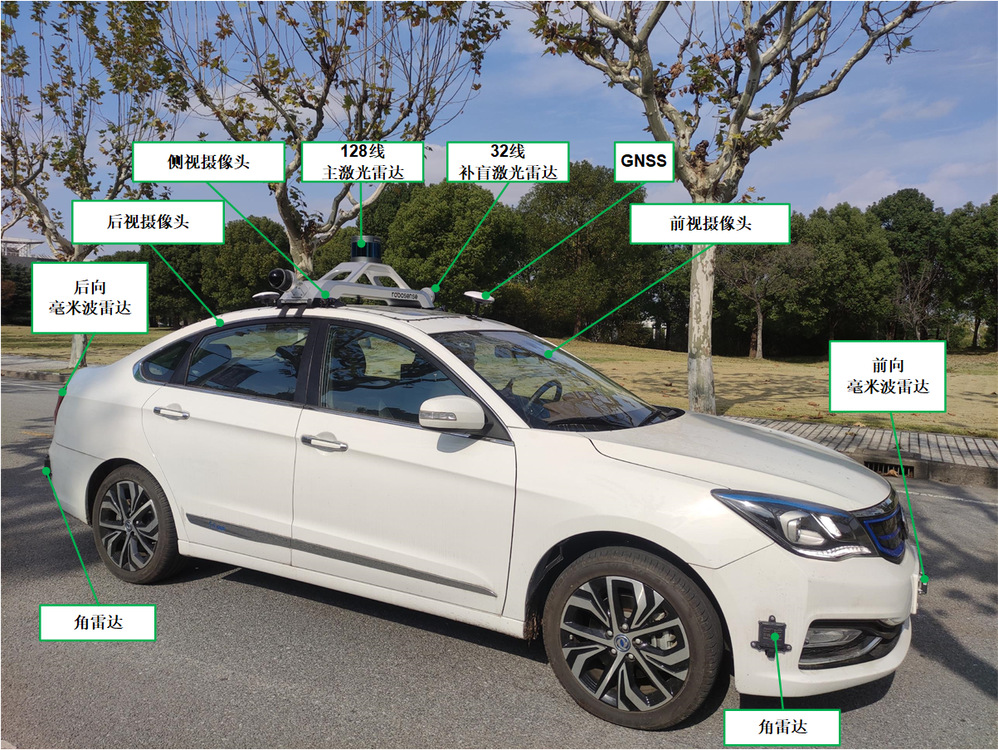
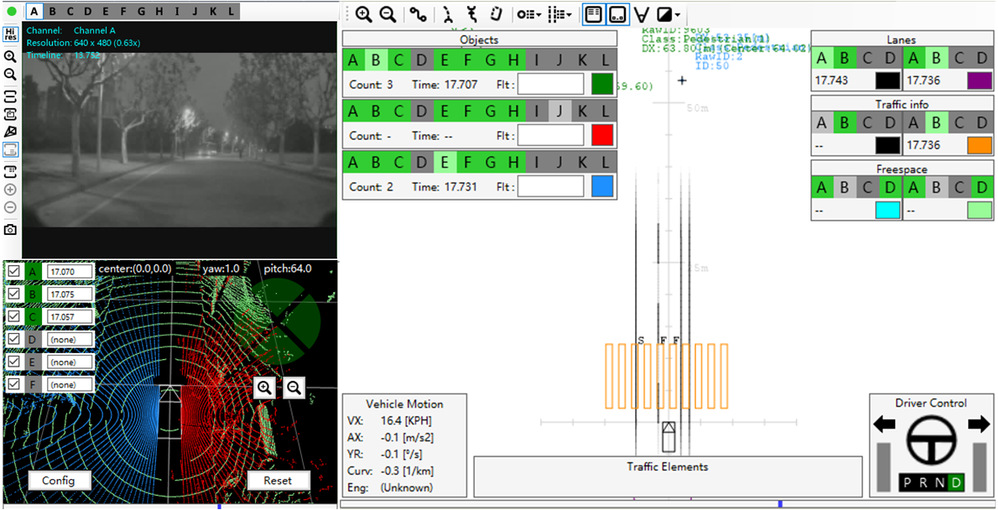
实验平台如下: